A Decrease font size. A Reset font size. A Increase font size.
循環器センター
呼吸器センター
脳卒中・脳神経センター
成育医療センター
目次
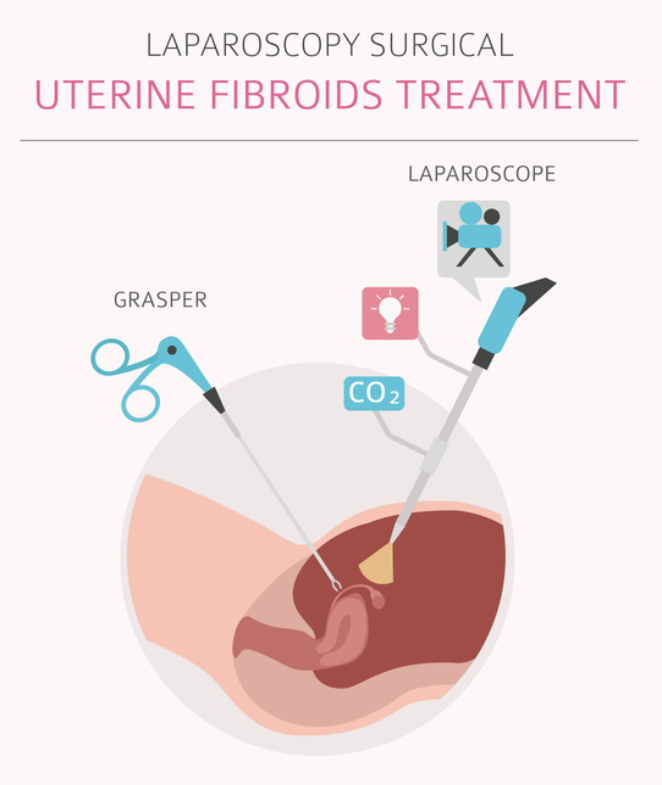
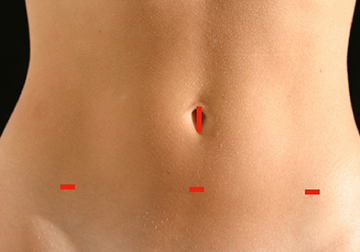
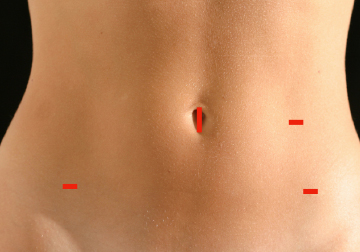
臍と腹壁に5〜15mmの皮切(傷)を設け、トロッカーという筒型の器具を装着します。(図1-1/1-2)
お腹の中を(腹腔)を炭酸ガス(CO2)で膨らませて(気腹といいます)、内視鏡(カメラ)や鉗子類を腹腔内に挿入し、モニター画面で観察しながら腹腔内で手術を行います。
通常、経腟的に子宮操作器具を固定し、子宮を動かすことにより腹腔内操作の補助を行います。
不妊症の診断・治療、異所性妊娠、卵巣腫瘍茎捻転、卵巣腫瘍、子宮内膜症、子宮筋腫、子宮腺筋症、初期子宮体がん、卵巣がんの診断的腹腔鏡など多岐にわたります。
気腹に関連する肩の痛みがありますが、術後2〜3日で消失します。また経膣的な子宮操作を行いますので、術後1週間程度、月経様の性器出血があります。
当科の過去3年間の手術実績では1/1203件(0.08%)の頻度でした。婦人科良性疾患のほとんどは内視鏡手術が可能と思われます。
当科での手術実績は「産婦人科手術数」を参照してください。
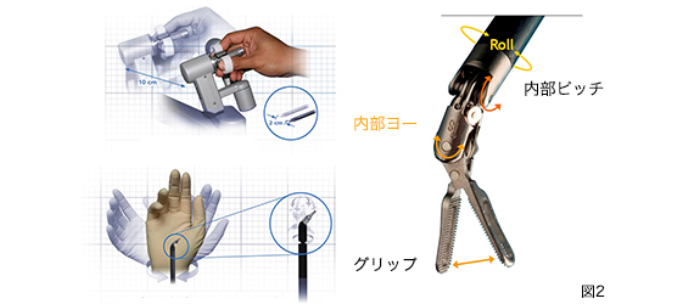
ダヴィンチシステムとは低侵襲技術を用いて複雑な手術を可能にした手術装置です。高画質で立体的な3Dハイビジョンシステムの手術画像の下、人間の手の動きを正確に再現することができます。人の手首よりもはるかに大きく曲がり、かつ回転する可動域の広い器具(鉗子)を用います。鉗子は通常の腹腔鏡用の鉗子よりも半分以下のサイズでより精緻な手技を可能にしました(写真1/上段が腹腔鏡用持針器/中段がダヴィンチ用持針器/下段が人差し指)。
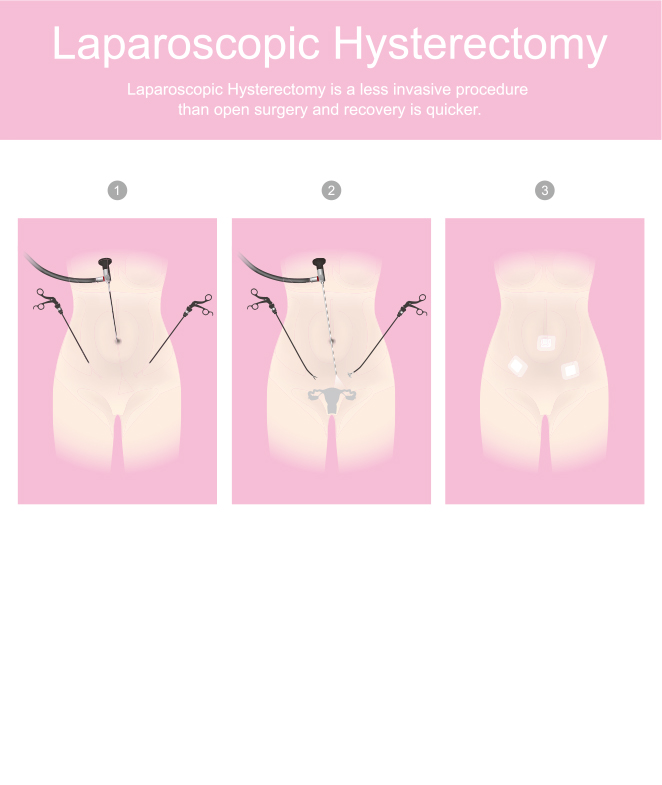
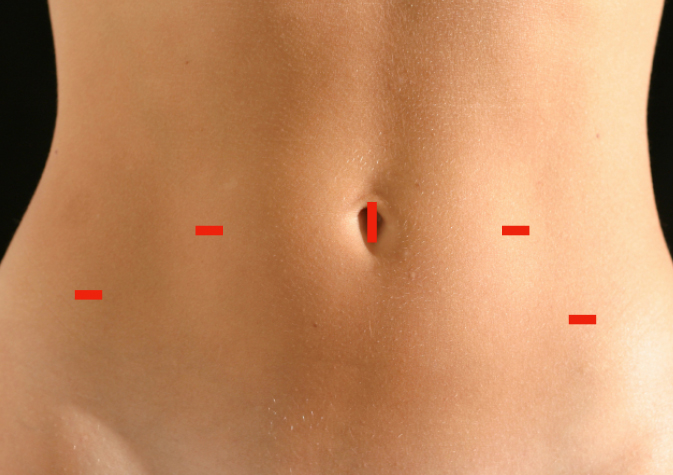
ロボット支援手術はロボットが行う手術ではなく、術者である医師が完全にコントロールしながら行う手術です。通常は下腹部に7〜12mmの皮切(傷)からトロッカー孔(写真2)を作成して手術を開始します。術者はサージョンコンソール(写真3)と呼ばれる装置から、患者側にドッキングされた4本のアームすなわちペイシャントカート(写真4)のスコープ1本と各種鉗子3本を操作します。
助手は左下腹部トロッカー孔から鉗子1本を操作します。手術操作は立体視が可能な3Dカメラを使用し20〜40倍の視野で繊細な操作が可能です。そして様々な機能を有する鉗子類を駆使して目的とする子宮を摘出します。摘出した子宮は通常、膣より回収し、膣断端は術者によるロボットの持針器で縫合します。子宮の大きさや性状により、膣からの回収が困難な場合は、子宮を腹腔内で再説して回収したり、下腹部に小切開を加えて回収することもあります。
子宮筋腫を始めとした良性子宮腫瘍です。子宮を摘出することにより症状の改善、消失を図り、摘出した子宮の病理組織学的診断を確定することが目的です。
気腹に関連する肩の痛みがありますが、術後2〜3日で消失します。
ロボットを使用しない通常の腹腔鏡手術に移行する場合があります。さらに腹腔鏡でも困難な場合は開腹手術に移行する場合もあります。
ダヴィンチ手術は認定資格(sergeon certificate)を取得しトレーニングを積んだ医師によって行われます。
医師をサポートするのがロボットの役割で、ダヴィンチ自身が勝手に動作することはありません。医師がロボットを活用し、より精緻な手術を行うと考えてください。
それぞれの疾患、患者さんの年齢、所得などの様々な条件によって負担する手術費用は異なります。
現在は腹腔鏡下子宮全摘術の手術費用と同じで診療報酬上設定されています。2018年4月から保険適応の範囲の拡大がなされ、当科では2020年4月より子宮良性腫瘍に対する子宮全摘術を実施しています。
今後、産婦人科医療を取り巻く環境はますます厳しくなるものと思われます。
このような中でやはり医療の原点は患者さんの視線にあった治療の提供ということを考えながら、地道に日々の自己研鑽を積みながら患者さんの要望に応え、その治療の選択をサポートしていくことではないかと考えております。
そのためにも地域の連携の先生方のご協力を得ながら選ばれる松山赤十字病院産婦人科でありたいと思っております。
よろしくお願いします。