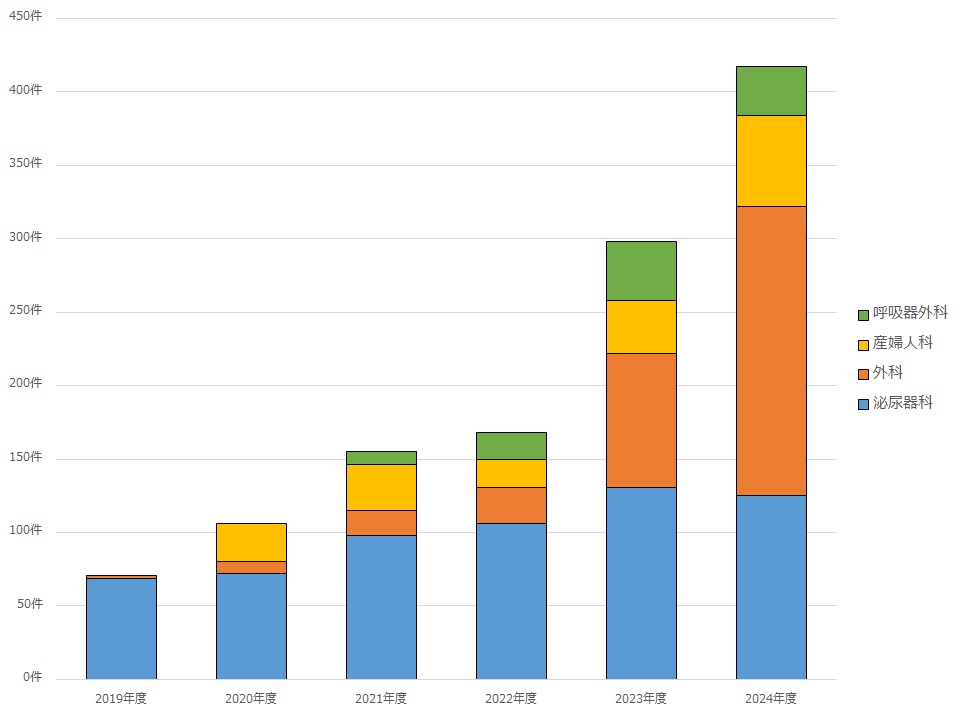
2019年4月に前立腺癌に対してロボット支援腹腔鏡下前立腺全摘除術が開始され、術式は腎部分切除術、膀胱全摘除術、仙骨膣固定術、腎盂形成術、腎尿管全摘除術が実施されています。導入当初より診療科医師・麻酔科医師、看護師、臨床工学技士、事務職員を中心にロボット支援手術ワーキングチームを立ち上げ、安心・安全な手術、トラブルを含めた情報共有、効率のよいロボットの運用を行ってきました。各診療科におきましても、消化器外科、産婦人科、呼吸器外科が相次いでロボット支援手術を導入、現在は19術式に対応しています。2024年は、肝胆膵外科でも肝臓領域を筆頭に、膵臓領域でも順次対応症例を拡大しており、適応術式は増加の一途です。術式毎に異なる麻酔管理も事前に麻酔科医と情報共有することで、安全性を担保しています。
手術件数も年々増加傾向にあり、初年度は71件、その後は106件、155件、168件、298件、418件となっています。2023年度は200件を大きく上回るペースでロボットが使用されるに至り、2023年11月よりDa Vinci Xiを導入、2台体制の運用となりました。慢性的な患者さんの手術までの待機期間が大幅に短縮されています。