“手術支援ロボットDa Vinci(ダヴィンチ)”を用いた消化管癌(直腸癌・結腸癌・胃癌)の手術を2020年より導入・開始しております。
ロボット支援手術は、これまで腹部の消化器癌で広く施行されるようになっていた腹腔鏡手術に対し、多関節機能、手振れ防止機能、スケーリング機能などを有した手術支援ロボットを3D環境下で操作する事で、より精密な手術を行うために開発された医療機器です。誤解の無いように追加しておくと、支援ロボットで自動的に手術が行われるのではなく、術者の手指の動きを支援ロボットアームに接続した鉗子などが患者さんの体内で正確・精密に再現されるシステムになっています。従って、我々外科医が、癌に対する手術を施行する上で考慮する、癌の根治性と機能温存という、相反する問題を解決しうる最新・最良の技術だと考えられています。
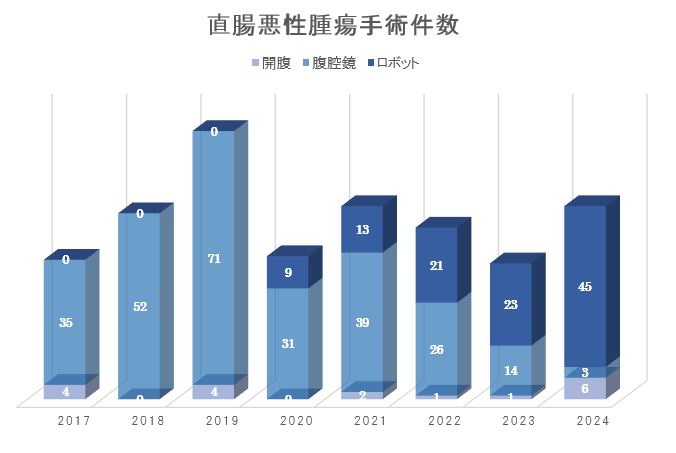
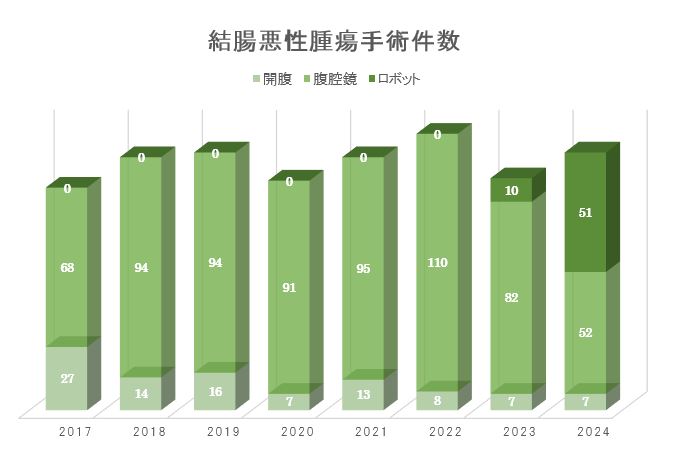
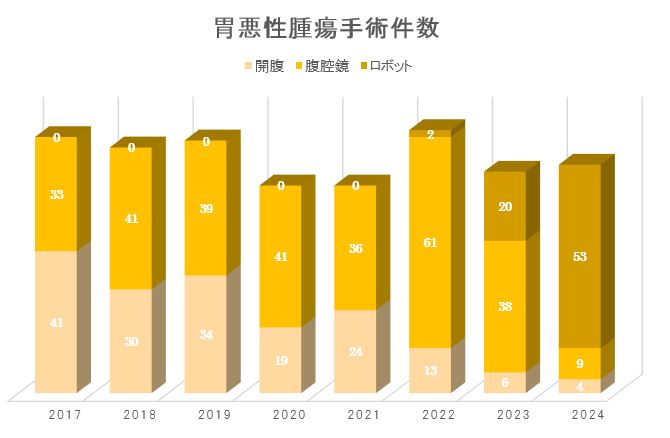
ロボット支援直腸切除・切断術は2018年4月に保険適応となり、当科では2020年2月より導入、2021年4月からは保険診療での手術を開始しました。また、ロボット支援胃切除術・噴門側胃切除術・胃全摘術も2018年4月に保険適用とされており、2022年4月より保険診療による手術を開始しています。さらに、ロボット支援手術の保険適応拡大に伴い、ロボット支援結腸悪性腫瘍手術も2022年4月に保険適応され、同様に2024年1月より保険診療での手術を開始しました。